A research team at the University of New South Wales in Australia has developed a robotic gripper that wraps and grips objects and lifts them like tentacles.
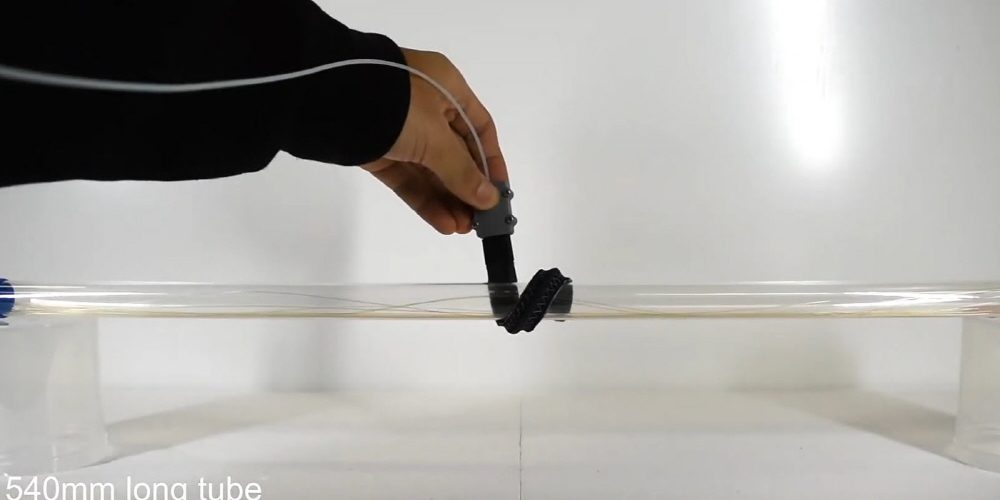
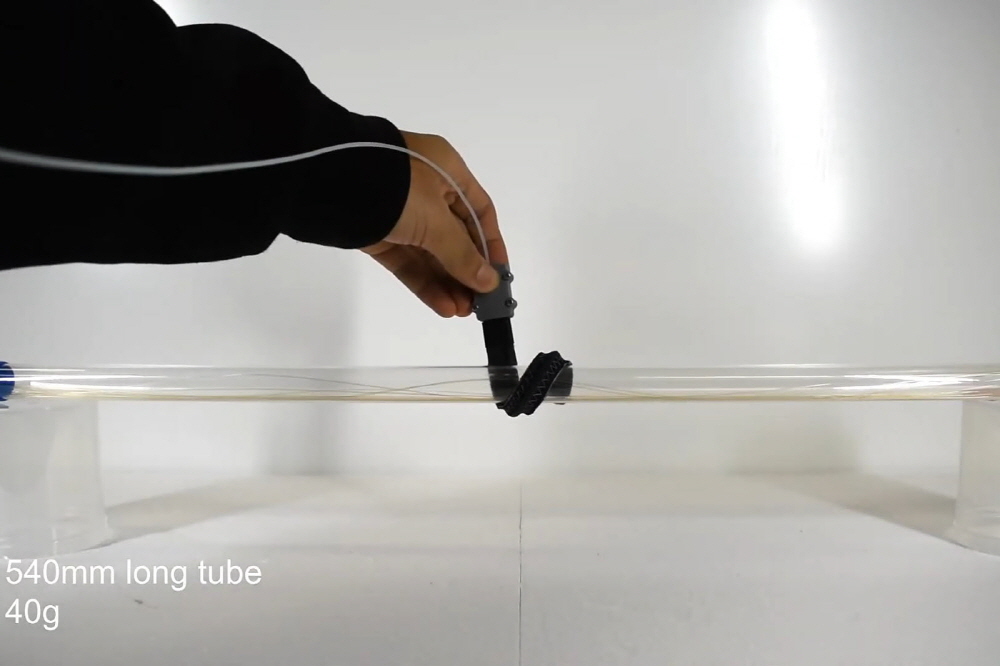
The surface of this gripper is made of soft cloth, and it can be deformed and wound by hydraulic pressure. For example, it can be used for work as if it gently wraps fragile objects such as fruit harvesting. The research team explained that the new soft fabric gripper is thin, flat, and lightweight, and can be used for lifting or retrieving objects inside a narrow structure such as a pen inside a tube. It has 15 times the sensitivity and real-time sensor than the existing tentacle robot, and it is soft and can be lifted with minimal grip.
In addition, the tentacle robot can change its height by heat, so it was able to lift a 1.8kg object, which is 220 times or more in the 8.2g self-weight test. The research team revealed that the gripper could be commercialized in about 12 to 16 months by integrating the gripper at the end of a robot arm equipped with a tactile feedback device developed previously. When attached to a prosthetic finger or the like, the device can extend from the tip of the finger and pick up objects with tentacles without holding the object directly. Related information can be found here .












Add comment