
Mammals maintain proper body temperature by using the cooling effect of the heat of vaporization when evaporating by secreting sweat from the sweat glands of the skin. We have developed a robotic arm that is equipped with such a sweat function and maintains the performance to prevent overheating.
Like living things, robots can suffer from overheating, and the development of an efficient cooling system is important for improving robot performance. Cornell University’s research team, which started this project, developed a robotic arm that controls the temperature with sweat like a human.
The ability to sweat is one of the most striking characteristics of humans. The research team notes that although humans are not the fastest-footed animals on the ground, the reason for their success as a carnivore was that they were able to sweat appropriately, regulate their body temperature, and continue to chase prey for long periods of time. Although robots and computer cooling systems had previously used liquids to circulate through closed tubes inside the machine, the research team adopted a natural solution to the overheating problem. The inside of the developed robot arm is filled with water and is connected to a surface with a plastic hole that reacts to heat. Normally the hole is closed, so water does not flow out of the robot arm. However, when the plastic that makes up the hole reaches a certain temperature, water flows out of the surface of the robot arm through the hole.
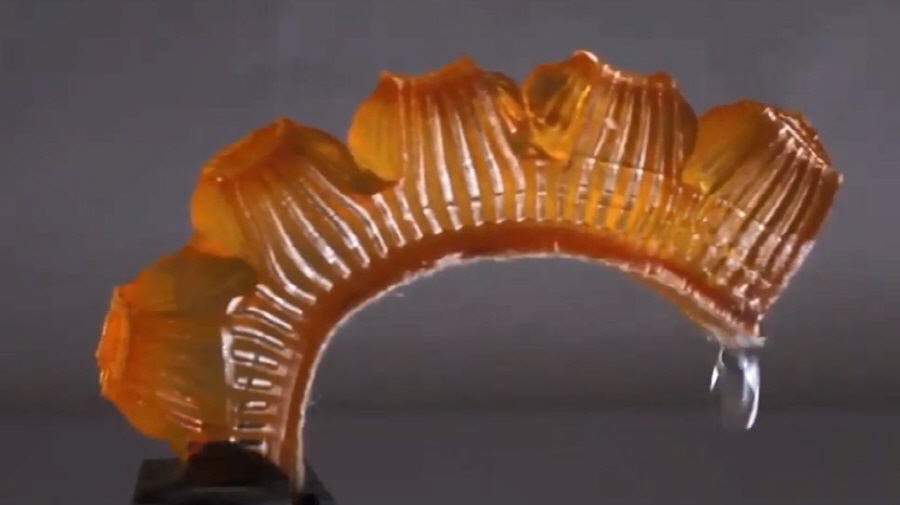
The robot arm developed by the research team is made with a 3D printer and consists of five fingers just like a human. In fact, if you look at the video, you can see water dripping from the tip of your bent finger. In this robotic arm, the internal water acts as a power source such as hydraulic oil. The finger of the robot arm is a hydrogel product containing 50% moisture, and the outermost layer is hard and the inner layer is made more flexible.
The robot arm has a structure in which water flows out of a hole located in the finger when it reaches a certain temperature. The surface area of the finger surface is increasing to increase the cooling effect by sweat, so in an environment where there is wind caused by a fan, 600% cooling efficiency is achieved compared to a robot arm that does not sweat. This sweat efficiency is said to have been more than three times more efficient than that of humans and horses, who have high cooling efficiency by sweat among mammals.
The best part of this strategy is that the thermal control performance is based on the material itself. It doesn’t require sensors and other parts to control the sweat of the robot arm. Through additional experiments, it is said that the effect of cooling the object itself held by the sweat from the robot arm is also confirmed.
In metal robots, since metal itself is an excellent conductor, it is becoming easier to dissipate heat. Meanwhile, the robots used for delicate tasks such as medical treatment and fresh food packaging are rubber, which is a number of excellent insulators. In soft robot cooling, which is difficult to remove such heat, the cooling function by the foot has an advantage. In addition, the fact that the sweat glands can be integrated into the robot to cool the sweat glands below the ambient temperature is an advantage that cannot be achieved with cooling by a fan.
A lot of the downside of sweat robots is that they need to regularly replenish the water they discharge through sweat. And the biggest problem is that the fingers of the robot arm are lubricated by sweat and friction is reduced, making it difficult to hold objects. The research team says it can solve this problem, such as adding a grip to the finger. Related information can be found here .












Add comment