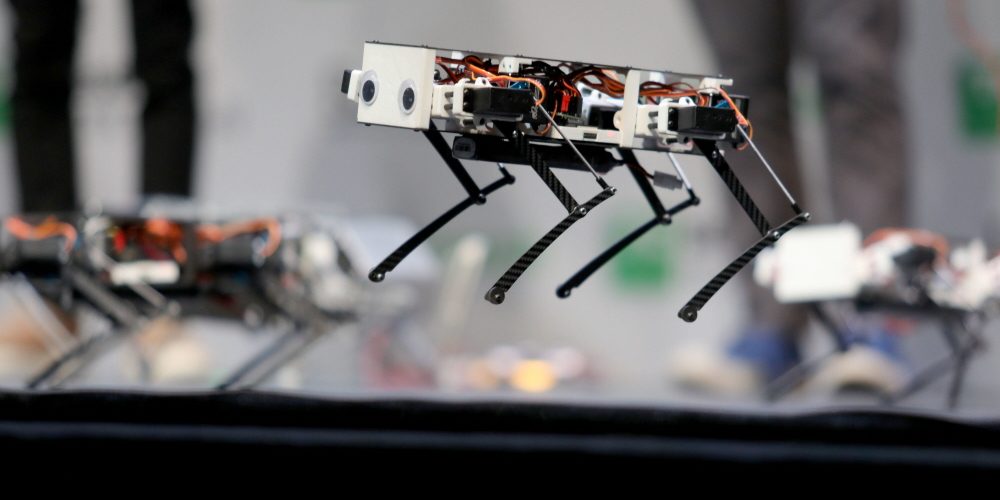
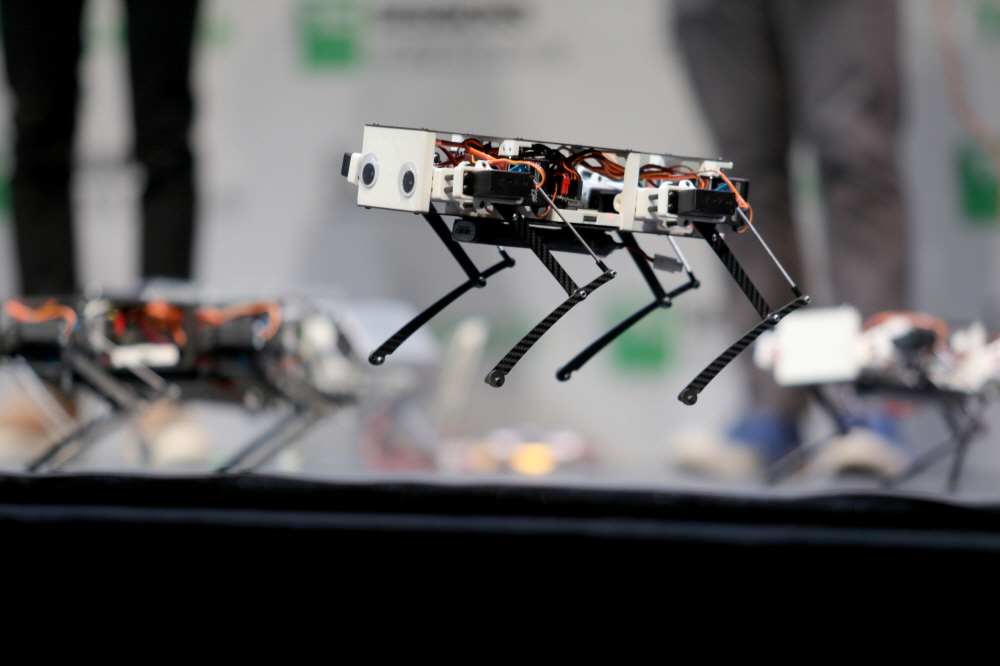
A research team at Stanford University has released parts and software necessary for the production of the Stanford Pupper, a small four-legged walking robot, and explains in detail the manufacturing method.
Stanford Puffer is a four-legged walking robot that resembles a dog without a neck. You can perform various movements, run, and even rotate on the spot. You can bend your legs, lie down, or jump. You can also perform an action that tilts the body by bending only certain feet.
This robot was designed on the premise of self-made. The cost for assembly parts is between $600 and $900. If you already have a Raspberry Pi, a PlayStation 4 dedicated controller for operation, Dual Shock 4, the required cost will be reduced. The production time varies depending on the presence or absence of expertise, but it takes about 4-10 hours. The difficulty of manufacturing is said to be the level of making a small quadcopter drone.
The list of parts required for Stanford puffer production can be found through the stred sheet. You can also see the part name and a link to the shopping mall site where you can purchase the part. Of course, anything that is not listed in the item is not for general sale. It must be printed on a 3D printer or purchased at a dedicated retailer .
The assembly instructions are divided into three parts: a leg, a body, and a PCB. The assembly demonstration video is published on YouTube, so you can learn how to assemble visually. Source code and installation instructions are github are described in detail in. Related information can be found here .












Add comment